Меню
Главная
Случайная статья
Настройки
|
«Марс-3» — советская автоматическая межпланетная станция (АМС) четвёртого поколения космической программы «Марс». Одна из трёх АМС серии М-71. Станция «Марс-3» предназначена для исследования Марса как с орбиты, так и непосредственно на поверхности планеты. АМС состояла из орбитальной станции — искусственного спутника Марса и спускаемого аппарата с автоматической марсианской станцией.
Первая в мире мягкая посадка спускаемого аппарата на Марс и единственная в советской космонавтике[1]. Передача данных с автоматической марсианской станции началась через 1,5 минуты после её посадки на поверхность Марса, длительность передачи видеосигнала составила 20 секунд[2].
Содержание
Технические характеристики- Масса АMC при запуске: 4625 кг[3]
- Масса орбитальной станции при запуске: 3625 кг
- Масса спускаемого аппарата при запуске: 1000 кг
- Масса спускаемого аппарата при входе в атмосферу Марса: нет сведений из авторитетных источников
- Масса автоматической марсианской станции: 355 кг (после мягкой посадки на Марс)
Конструкция
АМС «Марс-3» разработана в НПО имени С. А. Лавочкина, она состояла из орбитальной станции — искусственного спутника и спускаемого аппарата с автоматической марсианской станцией[3]. Компоновку АМС предложил молодой конструктор Владимир Андреевич Асюшкин. Система управления, массой 167 кг и потребляемой мощностью 800 ватт, разработана и изготовлена НИИ автоматики и приборостроения.
Основу орбитальной станции составлял блок баков главной двигательной установки цилиндрической формы. К этому блоку крепились панели солнечных батарей, параболическая остронаправленная антенна, радиаторы системы терморегулирования, спускаемый аппарат и приборный отсек.
Приборный отсек представлял собой тороидальный герметичный контейнер, в котором размещались бортовой вычислительный комплекс, системы навигации и ориентации и другие системы. Снаружи на приборном отсеке крепились приборы астронавигации.
Межпланетная станция оборудована системой космической автономной навигации. В системе использовался оптический угломер. За 7 часов до прилёта к Марсу прибор должен был провести первое измерение углового положения Марса относительно базовой системы координат. Данные измерений передавались в бортовой компьютер системы управления, который рассчитывал вектор третьей коррекции, необходимый для перевода станции на номинальную траекторию. По результатам расчётов система управления космического аппарата без вмешательства с Земли выдавала команды на выполнение коррекции.
Прототипом системы управления являлась вычислительная система лунного орбитального корабля, ядром которой была БЦВМ С-530 на элементах типа «Тропа»[4].
Спускаемый аппарат представлял собой конический аэродинамический тормозной экран диаметром 3,2 метра и углом у вершины 120 градусов, закрывающий автоматическую марсианскую станцию (по форме близкую с сферической). Сверху на автоматической марсианской станции был прикреплён стяжными лентами тороидальный приборно-парашютный контейнер, содержавший в себе вытяжной и основной парашюты, и приборы, необходимые для обеспечения увода, стабилизации, осуществления схода с околомарсианской орбиты, торможения и мягкой посадки, и соединительная рама. На раме размещены твердотопливный двигатель перевода спускаемого аппарата с пролётной на попадающую траекторию и агрегаты системы автономного управления для стабилизации спускаемого аппарата после его расстыковки с орбитальной станцией. На борту спускаемого аппарата также был закреплён вымпел с изображением Государственного герба СССР. Перед полётом спускаемый аппарат был подвергнут стерилизации.
В состав автоматической марсианской станции входил марсоход ПрОП-М.
Полёт
Станция была запущена с космодрома Байконур при помощи ракеты-носителя «Протон-К» с дополнительной 4-й ступенью — разгонным блоком Д 28 мая 1971 года в 18:26:30 по московскому времени. В отличие от АМС предыдущего поколения, «Марс-3» был сначала выведен на промежуточную орбиту искусственного спутника Земли, а затем разгонным блоком Д переведён на межпланетную траекторию.
Полёт к Марсу продолжался более 6 месяцев. 8 июня и в ноябре 1971 года были успешно проведены коррекции траектории движения. До момента сближения с Марсом полёт проходил по программе. Прилёт станции к планете совпал с большой пылевой бурей. Пылевая буря началась 22 сентября 1971 года в светлой области Noachis в южном полушарии. К 29 сентября охватила двести градусов по долготе от Ausonia до Thaumasia. 30 сентября закрыла южную полярную шапку. Мощная пылевая буря затрудняла научные исследования поверхности Марса с искусственных спутников «Марс-2», «Марс-3», «Маринер-9». Только около 10 января 1972 года пылевая буря прекратилась и Марс принял обычный вид.
2 декабря 1971 года была проведена третья коррекция траектории. Коррекция была выполнена с помощью бортовой автоматики без использования наземных средств. Система автономной астроориентации станции обеспечила её ориентацию и определила положение станции относительно Марса. Полученные данные были автоматически введены в бортовую электронно-вычислительную машину, которая рассчитала величину и направление корректирующего импульса и выдала необходимые команды для проведения коррекции. После проведения третьей коррекции станция вышла на траекторию, проходящую на расстоянии 1500 км от поверхности Марса.
Спускаемый аппарат станции «Марс-3» совершил первую в мире мягкую посадку на поверхность Марса 2 декабря 1971 года.
Посадка началась после третьей коррекции межпланетной траектории полёта и отделения спускаемого аппарата от орбитальной станции. Перед отделением станция «Марс-3» была сориентирована так, чтобы спускаемый аппарат после отделения мог двигаться в требуемом направлении. Отделение произошло в 12 часов 14 минут московского времени 2 декабря, когда АМС подлетала к планете, до торможения орбитальной станции и перехода её на орбиту спутника Марса. Через 15 минут сработал твердотопливный двигатель перевода спускаемого аппарата с пролётной траектории на траекторию встречи с Марсом. Получив дополнительную скорость, равную 120 м/с (432 км/ч), спускаемый аппарат направился в расчётную точку входа в атмосферу. Затем система управления, размещённая на ферме, развернула спускаемый аппарат коническим тормозным экраном вперёд по направлению движения, чтобы обеспечить правильно ориентированный вход в атмосферу планеты. Для поддержания спускаемого аппарата в такой ориентации во время полёта к планете была осуществлена гироскопическая стабилизация. Раскрутка аппарата по продольной оси проводилась с помощью двух малых твердотопливных двигателей, установленных на периферии тормозного экрана. Ферма с системой управления и двигателем перевода, ставшая теперь ненужной, была отделена от спускаемого аппарата.
Полёт от разделения до входа в атмосферу продолжался около 4,5 часов. По команде от программно-временного устройства были включены два других твердотопливных двигателя, также расположенных на периферии тормозного экрана, после чего вращение спускаемого аппарата прекратилось. В 16 часов 44 минуты спускаемый аппарат вошёл в атмосферу под углом, близким к расчётному, со скоростью около 5,8 км/с, и началось аэродинамическое торможение. В конце участка аэродинамического торможения ещё на сверхзвуковой скорости полёта по команде датчика перегрузки с помощью порохового двигателя, расположенного на крышке отсека вытяжного парашюта, был введён вытяжной парашют. Спустя 1,5 секунды с помощью удлинённого заряда разрезался торовый парашютный отсек, и верхняя часть отсека (крышка) была уведена от спускаемого аппарата вытяжным парашютом. Крышка, в свою очередь, ввела основной парашют с зарифлённым куполом. Стропы основного парашюта крепились за связку твердотопливных двигателей, которые уже крепились непосредственно к спускаемому аппарату.
Когда аппарат затормозился до околозвуковой скорости, то по сигналу от программно-временного устройства была проведена разрифовка — полное раскрытие купола основного парашюта. Спустя 1—2 секунды был сброшен аэродинамический конус и открылись антенны радиовысотомера системы мягкой посадки. За время спуска на парашюте в течение нескольких минут скорость движения снизилась примерно до 60 м/с (216 км/ч). На высоте 20—30 метров по команде радиовысотомера был включён тормозной двигатель мягкой посадки. Парашют в это время был уведён в сторону другим ракетным двигателем, чтобы его купол не накрыл автоматическую марсианскую станцию. Спустя некоторое время двигатель мягкой посадки выключился, и спускаемый аппарат, отделившись от парашютного контейнера, опустился на поверхность. При этом парашютный контейнер с двигателем мягкой посадки с помощью двигателей малой тяги был уведён в сторону. В момент посадки толстое пенопластовое покрытие защитило станцию от ударной нагрузки. Посадка была осуществлена между областями Электрида и Фаэтонтия. Координаты точки посадки
Мягкая посадка на Марс является сложной научно-технической задачей. Во время разработки станции «Марс-3» рельеф поверхности Марса был изучен слабо, сведений о грунте было крайне мало. Кроме того, атмосфера очень разрежена, возможны сильные ветры. Конструкция аэродинамического конуса, парашютов, двигателя мягкой посадки выбраны с учётом работы в широком диапазоне возможных условий спуска и характеристик марсианской атмосферы, причём их вес минимальный.
В течение 1,5 минут после посадки автоматическая марсианская станция готовилась к работе, а затем начала передачу панорамы окружающей поверхности. 20 секунд станция передавала сигнал с видеокамер аппарата по двум независимым радиоканалам, затем трансляция прекратилась. АМС передала только первые 79 строк фототелевизионного сигнала (правый край панорамы). Полученное изображение представляло собой хаотически расположенные белые, серые и чёрные полосы, на которых не удалось выявить ни единой детали.
Впоследствии предполагали различные причины внезапного прекращения сигнала с поверхности: опасная горизонтальная скорость при посадке («Марс-3» вошёл в атмосферу во время всепланетной пыльной бури, когда скорость ветра вблизи поверхности, по данным «Маринера-9», составляла более 140 метров в секунду[6]), коронный разряд в антеннах передатчика из-за мощной пылевой бури[7], повреждение аккумуляторной батареи.
Орбитальная станция после отделения спускаемого аппарата выполнила 2 декабря 1971 года торможение и вышла на нерасчётную орбиту искусственного спутника Марса с периодом обращения 12 суток 16 часов 3 минуты (планировалась орбита с периодом обращения 25 часов). О причинах выхода на нерасчётную орбиту нет сведений из авторитетных источников. Впоследствии предполагали различные причины: недостаточно оттестированное программное обеспечение, поэтому время работы двигателя при торможении оказалось меньше расчётного, повышенный расход топлива при коррекциях траектории вызванный нештатной работой ракеты-носителя.
23 августа 1972 года ТАСС сообщил о завершении программы полёта. «Станция свыше 8 месяцев осуществляла комплексную программу исследования Марса. За это время станция совершила 20 оборотов вокруг планеты. АМС продолжала исследования до исчерпания азота в системе ориентации и стабилизации».
В 2002 году в журнале «Космические исследования» опубликована статья, в которой о работе «Марс-3» на околомарсианской орбите указано следующее: «В течение четырёх месяцев проводились ИК-радиометрия, фотометрия, измерения состава атмосферы, магнитного поля и плазмы»[8].
Разработчики фототелевизионной установки (ФТУ) использовали неправильную модель Марса, из-за чего были выбраны неверные выдержки. Снимки получались пересветлёнными, практически полностью непригодными. После нескольких серий снимков (в каждой по 12 кадров) фототелевизионная установка не использовалась[3].
Прибор оценки проходимости
ПрОП-М — первый в мире марсоход. Назначение — измерение плотности грунта. Над прибором на ВНИИТрансмаш на протяжении пяти лет трудились 150 человек во главе с конструктором Александром Леоновичем Кемурджианом.
Одинаковые марсоходы ПрОП-М входили в состав автоматических марсианских станций, которые были доставлены на поверхность Марса в 1971 году спускаемыми аппаратами советских межпланетных станций «Марс-2» и «Марс-3». Спускаемый аппарат «Марс-2» разбился при посадке. Спускаемый аппарат «Марс-3» совершил мягкую посадку 2 декабря 1971 года, но информация с марсохода не была получена.
Поиск места посадки
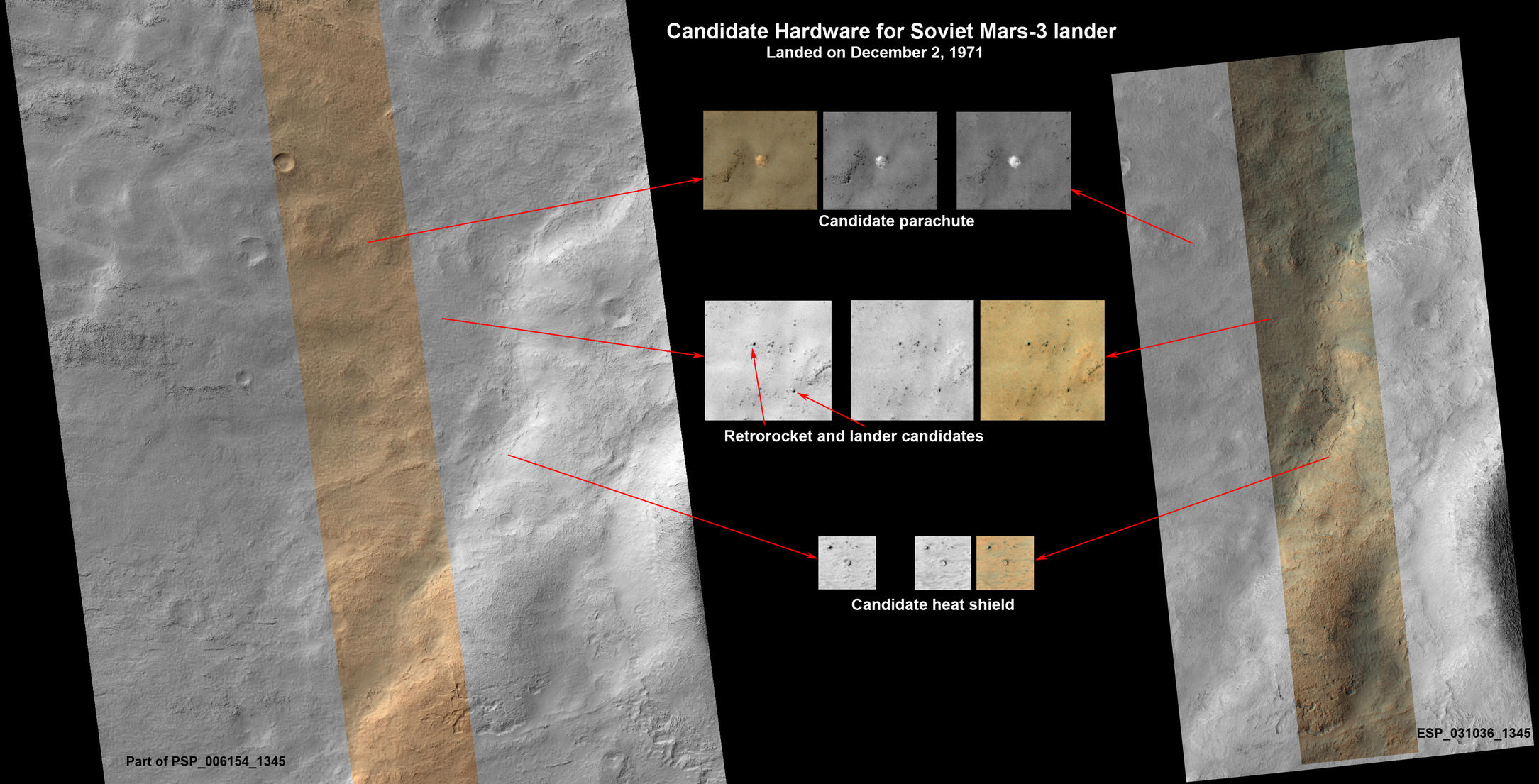
В рамках выполнения программы полёта Mars Reconnaissance Orbiter проводились попытки найти место посадки аппарата «Марс-3», наряду с поисками других марсианских автоматических станций, запущенных человечеством в XX веке. Долгое время станцию не удавалось обнаружить в предполагаемых координатах посадки. В 2012—2013 годах любители космонавтики во главе с известным блогером и популяризатором космических исследований Виталием Егоровым (Zelenyikot) произвели визуальный просмотр и анализ снимков высокого разрешения предполагаемой зоны посадки станции, которые были сделаны в 2007 году спутником Mars Reconnaissance Orbiter[9].
В результате были выявлены объекты, являющиеся элементами спускаемого аппарата «Марс-3». На снимках были идентифицированы автоматическая марсианская станция, парашют, двигатель мягкой посадки и аэродинамический тормозной экран. В поисках им помогали специалисты НАСА, ГЕОХИ, РКС, НПО им. Лавочкина[1][10][11][12]
Сравнение с АМСМаринер-9- Тепловое излучение грунта, по которому определялась его структура, исследовалось не только в инфракрасном, но (в отличие от «Маринера-9») и в радиодиапазоне[13].
- Получены фотометрические профили Марса глобального характера во многих спектральных диапазонах. Таких измерений «Маринер-9» не проводил[13].
- Определялось содержание воды в атмосфере. Методика измерения использовала область спектра, где доминирует отражённое солнечное излучение, а не тепловое, и интенсивность полосы почти не зависит от вертикального распределения температуры. Такая методика, в принципе, совершеннее методики использованной на «Маринере-9»[13].
Места посадок автоматических станций на Марс
Спирит
Оппортьюнити
Соджорнер
Викинг-1
Викинг-2
Феникс
Марс-3
Кьюриосити
Скиапарелли
См. также- «Марс 1971C» — советская автоматическая межпланетная станция четвёртого поколения из серии М-71, предназначенная для исследования Марса с орбиты искусственного спутника.
- «Марс-2» — советская АМС четвёртого поколения из серии М-71, предназначенная для исследования Марса как с орбиты искусственного спутника, так непосредственно на поверхности планеты.
Примечания
- 1 2 На Марсе нашли гордость советской космонавтики . Дата обращения: 26 июня 2020. Архивировано 28 сентября 2016 года.
- Асюшкин В. А. и др. Автоматические космические аппараты для фундаментальных и прикладных научных исследований (рус.) / под общ. ред. Г. М. Полищука, К. М. Пичхадзе. — Москва: МАИ-Принт, 2010. — 659 с. — ISBN 978-5-7035-2176-2.
- 1 2 3 Марс-71 (Марс-2 и Марс-3) . Сайт НПО им. Лавочкина. Дата обращения: 17 февраля 2014. Архивировано из оригинала 10 мая 2013 года.
- Глазков, 2005.
- Названия двух российских городов появились на карте Марса | РИА Новости Архивная копия от 9 августа 2013 на Wayback Machine.
- Саган, 2005.
- Perminov, 2018.
- Мороз, Хантресс, 2002.
- Виталий Егоров. Как мы искали Марс-3 . Хабрахабр (11 апреля 2013). Дата обращения: 11 апреля 2013. Архивировано 17 апреля 2013 года.
- Guy Webster. NASA Mars Orbiter Images May Show 1971 Soviet Lander (англ.). НАСА (11 апреля 2013). Дата обращения: 11 апреля 2013. Архивировано из оригинала 17 апреля 2013 года.
- NASA Mars Orbiter Images May Show 1971 Soviet Lander . Дата обращения: 2 января 2020. Архивировано 17 апреля 2019 года.
- 1 2 Webster, Guy. NASA Mars Orbiter Images May Show 1971 Soviet Lander . NASA (11 апреля 2013). Дата обращения: 12 апреля 2013. Архивировано 29 июня 2017 года.
- 1 2 3 Новое о Марсе, 1974.
Литература
Ссылки
|
|
{kind=link}
{kind=link}